Students: Evan Dill (graduated), Adam Schultz, Russell Gilabert
As the potential use of autonomous unmanned aerial vehicles has become more prevalent in both the public and private sectors, the need for a reliable positioning, navigation, and mapping (PNM) capability enabling operation of these platforms in both indoor and outdoor environments has become increasingly important. There are many different approaches that have proven effective at providing these PNM capabilities in specific operational environments, but most systems show degraded performance or even become unavailable when transitioning to a different environment. The following work outlines a method that provides a PNM solution and enables operation across multiple different environments including outdoor and structured indoor environments.
Objectives:
Make operational an Unmanned Aerial Vehicle(UAV) equipped with Sensors capable of collecting GNSS, inertial, optical, laser, barometric altimeter and data.
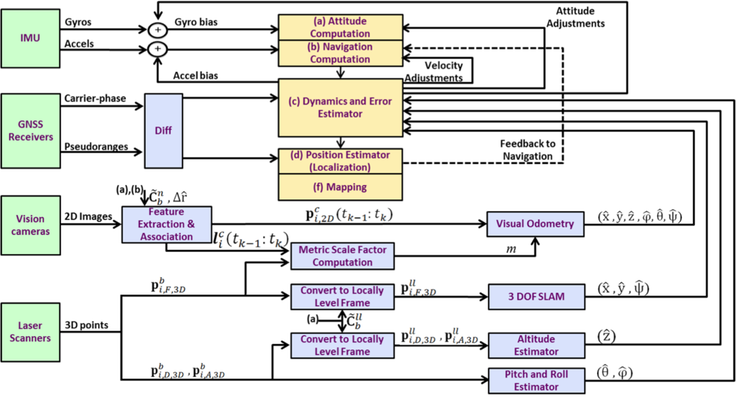
Design and implement a multi-sensor pose estimator (position and attitude), for UAVs to enable seamless operation in and between an outdoor and structured indoor environment based on GPS, IMU, laser range scanners, altimeters and vision cameras.
Design and implement a multi-sensor partial 3D map estimator for UAVs operating in an indoor and outdoor environment.
Test and evaluate (in terms of availability and accuracy) the designs under (B) and (C) using data collected on a Multi-copter (i.e. hexacopter) during operation through the target environments.
Operational Scenario:
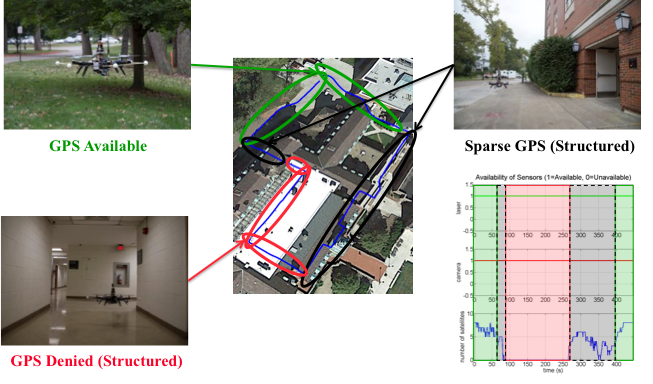
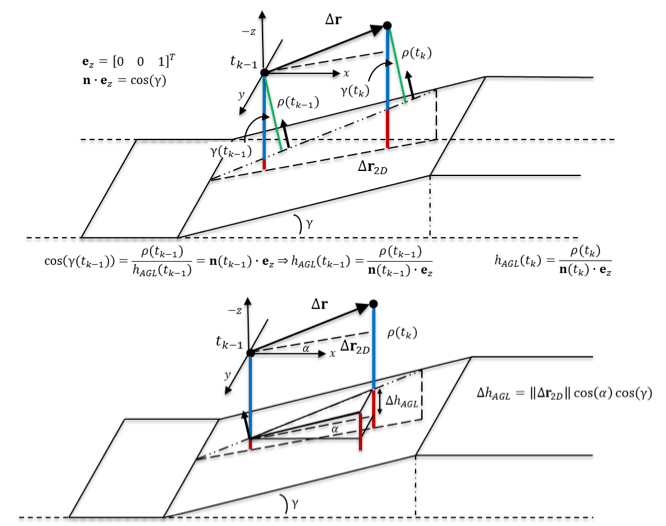
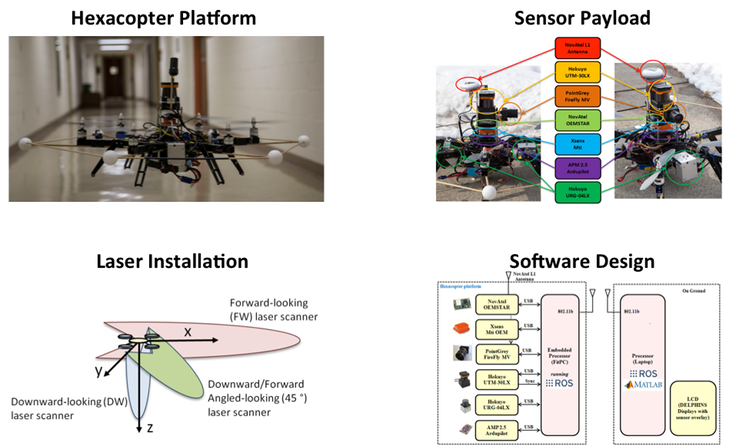
Navigation Methodology:
Data Collection Platform:
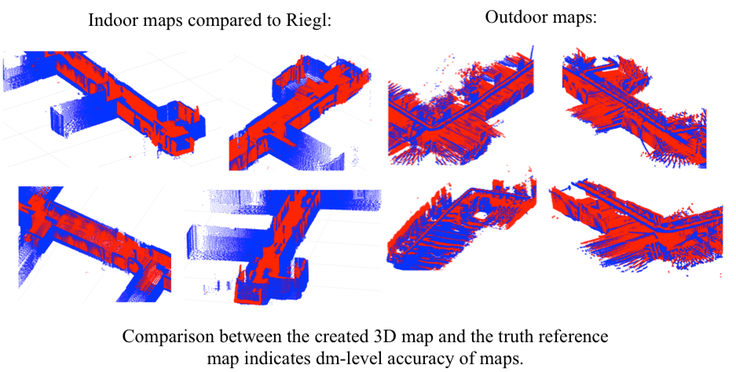
Mapping "truth" Reference
Created 3D map can be compared to “truth reference” map for quantifying performance.
Evaluation of created map inherently quantifies performance of 6DOF estimator

Riegl LMS-Z360i terrestrial laser scanner with calibrated Nikon D100 digital camera
Results: Navigation
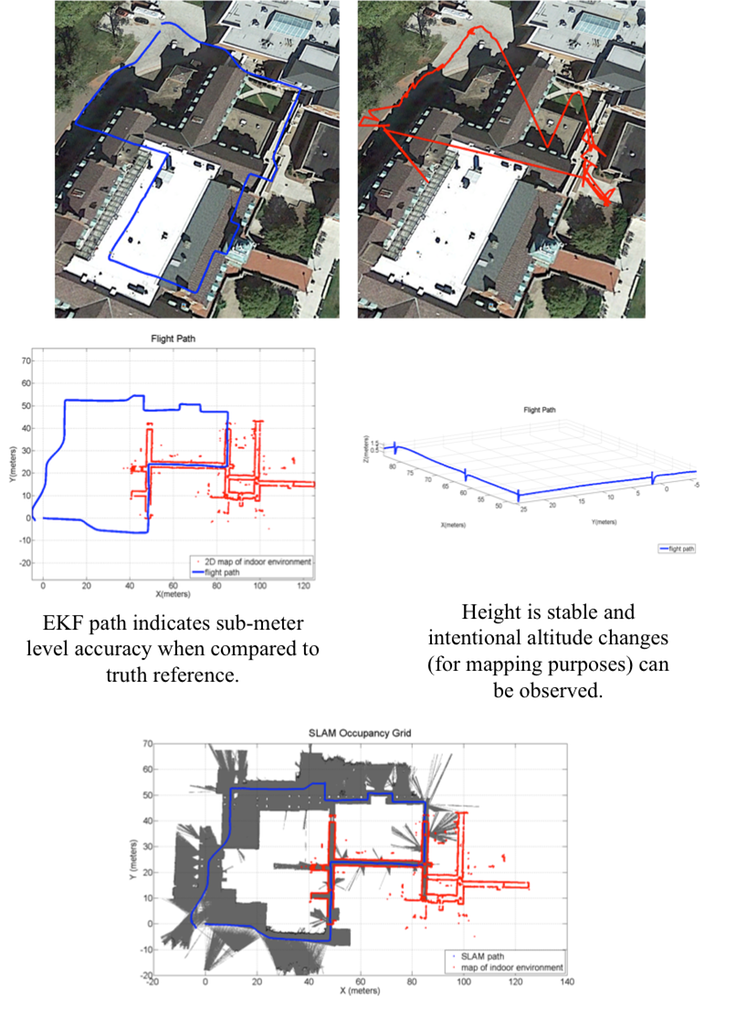
Results: Mapping