Students: Pengfei Duan, Sudha Vana (graduated)
Collaboration: DLR (Germany)
Future Aircraft Surveillance Applications (ASA) systems for separation assurance applications (e.g., conflict detection and resolution, final approach and runway occupancy awareness, and airport surface situational awareness methods) will benefit from the introduction of Automatic Dependent Surveillance-Broadcast (ADS-B). Current ADS-B implementation uses navigation and surveillance performance parameters (e.g., NACp, NACv, NIC, Rc, and SIL) to specify aircraft uncertainties, and they are prove to be conservative in nature. Once the air traffic density doubles or even triples as the Next Generation Air Transportation System (NextGen) envisions, some aviation operations may require higher surveillance performance to ensure safety.
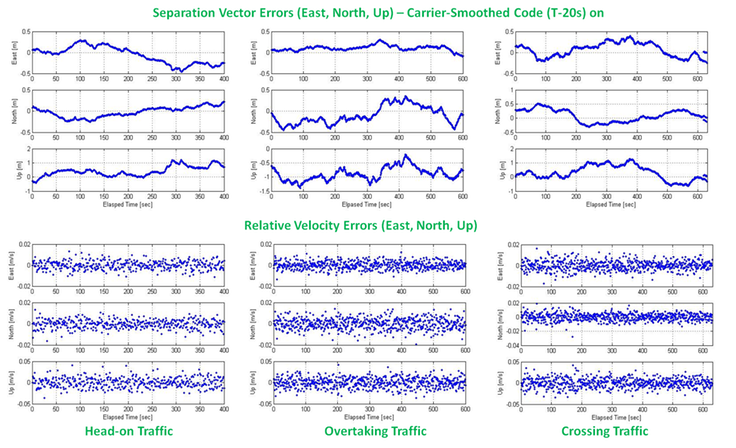
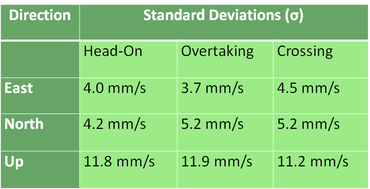
An alternative measurement-based ADS-B system, which relies on transmission of Global Navigation Satellite System (GNSS) measurements rather than processed state information and performance parameters, has been proposed to fundamentally increase the input data quality level of the ASA systems and support improved surveillance performance. Flight test results show that the measurement-based ADS-B system provides meter-level relative position accuracy and millimeter-per-second level relative velocity accuracy. Particularly, the extreme high relative velocity accuracy significantly improves the performance of separation assurance.
Separation Assurance
Commonly referred to as a conflict, which is defined as “a predicted violation of parameterized minimum separation criteria for adverse weather, aircraft traffic, special air usage, other airspace, turbulence, noise sensitive areas, terrain and obstacles, etc.”
The separation assurance application is usually being conducted several minutes ahead of a possible loss of separation scenario to fill a gap between the time to conflict that the situation can be resolved through air traffic control trajectory negotiation (strategic domain) and the time to conflict at which the Traffic Collision Avoidance System (TCAS) starts to provide collision avoidance guidance (time-critical domain).
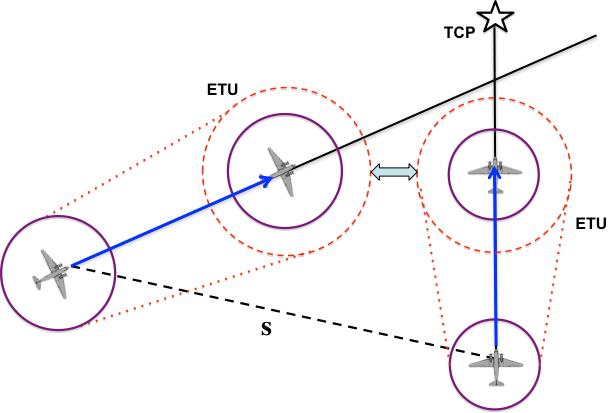
The quality of the predicted ownship and traffic positions forward in time is dependent on 1) the time horizon Ti, 2) the dynamics of both ownship and traffic, and 3) the probabilistic aspects of the prediction process.
While the EPU due to the initial position estimate is statistically bounded, the ETU will grow over time due to an error in the velocity estimate, which should be incorporated in the conflict detection and resolution algorithms.
Transmit (GPS) Measurements, Not Coordinates
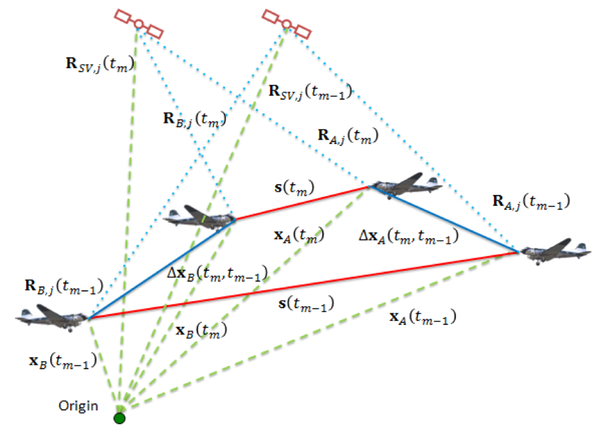
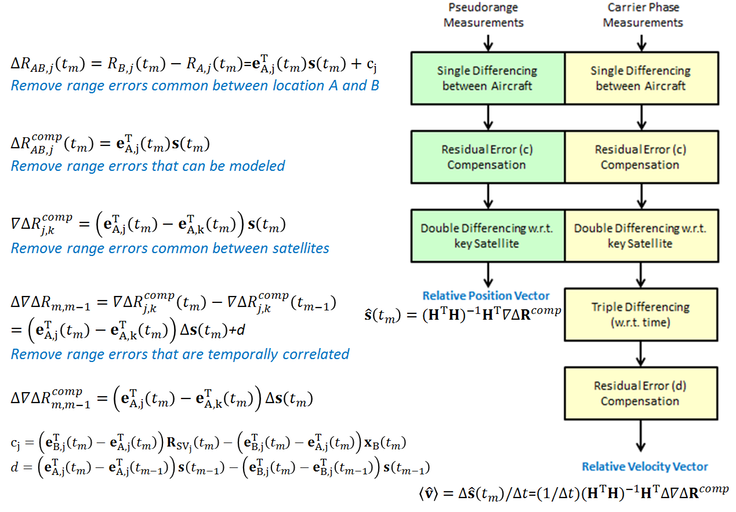
Relative Positioning Methodology
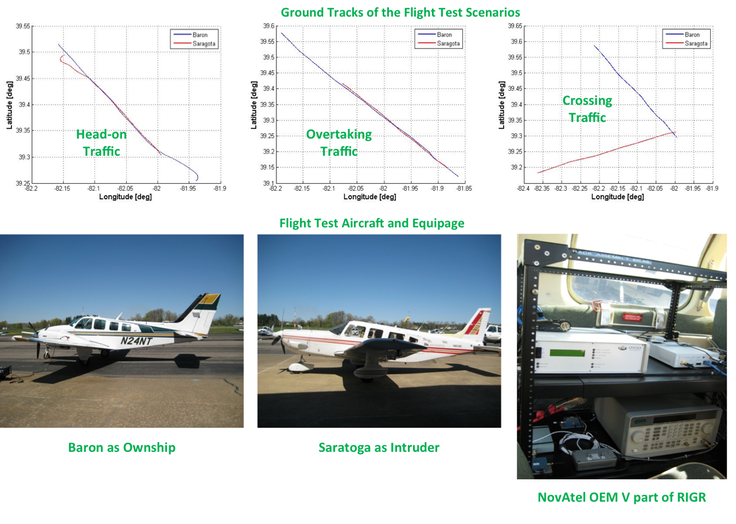
Flight Test Setup
Flight Test Results