Student: Anath Vadlamani (graduated)
Autonomous Navigation (and Mapping) Capability in GPS-challenged/denied and Unknown Terrain Environments
Solution 0: Inertial Navigation Systems. Provide the necessary states of Position/Velocity/Attitude to drive a flight control system. However, the states drift over time.
Solution 1: Terrain Referenced Navigation (TRN). Need onboard terrain database to perform height profile correlation – not operational in unknown environments.
Solution 2: GPS/INS. GPS is an excellent complement to INS, however, not operational in non-GPS signal environments.
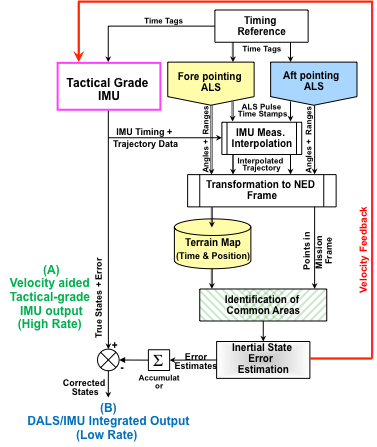
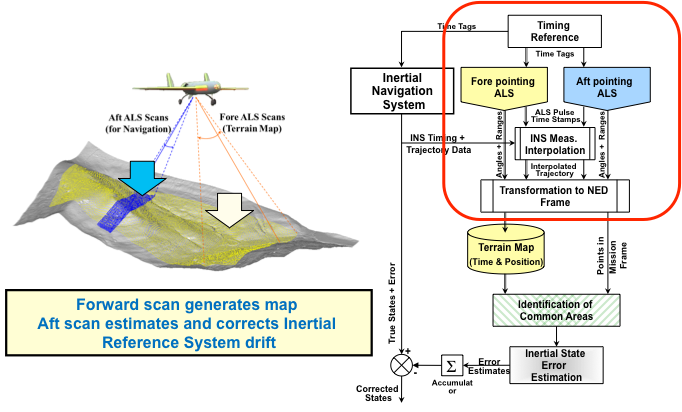
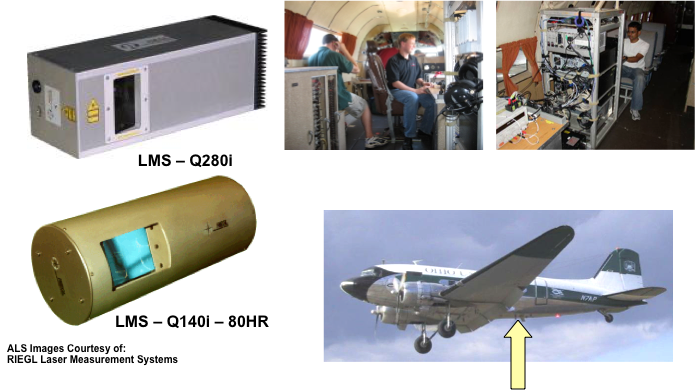
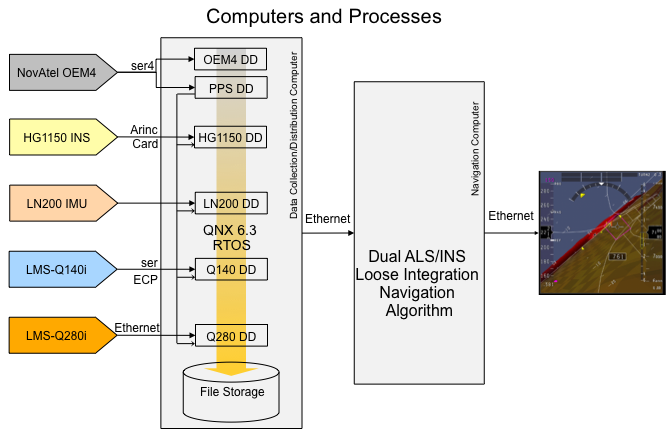
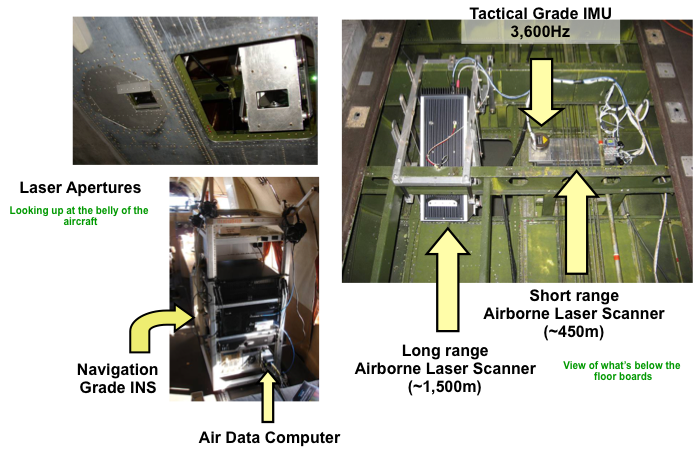
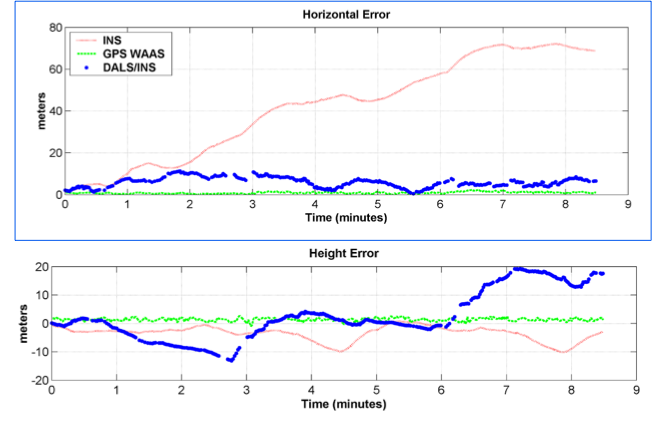
Dual-laser aided Inertial Integration
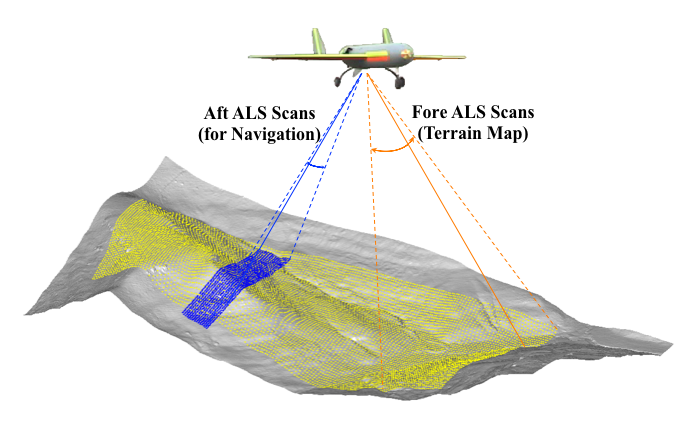
Dead-Reckoning Terrain Referenced Navigation (TRN) scheme using in-flight generated map
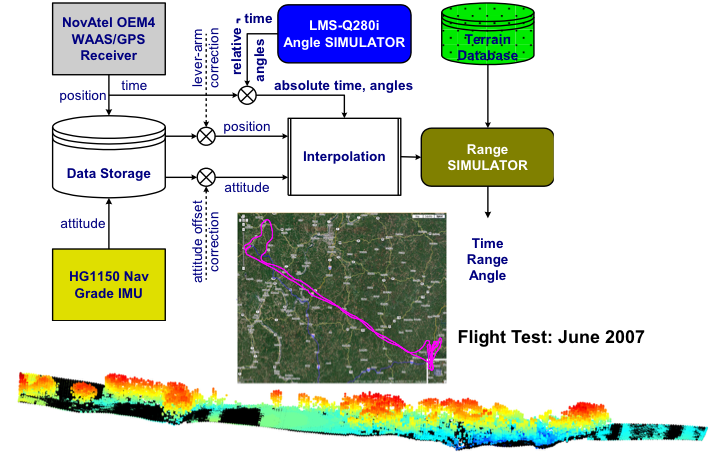
Flight test setup - Ohio University DC-3
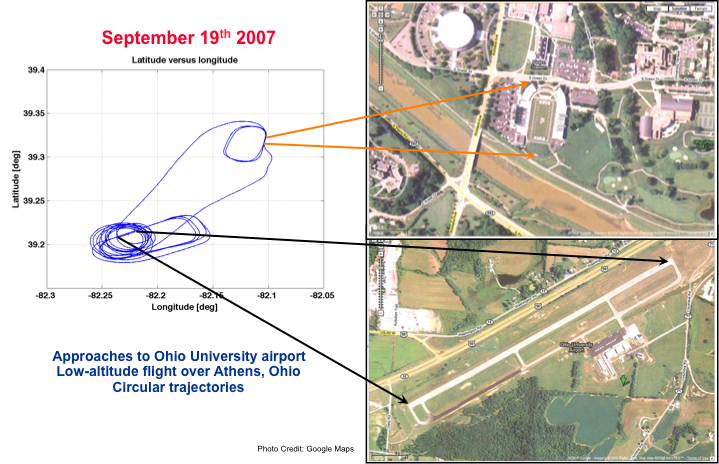
Flight test profile
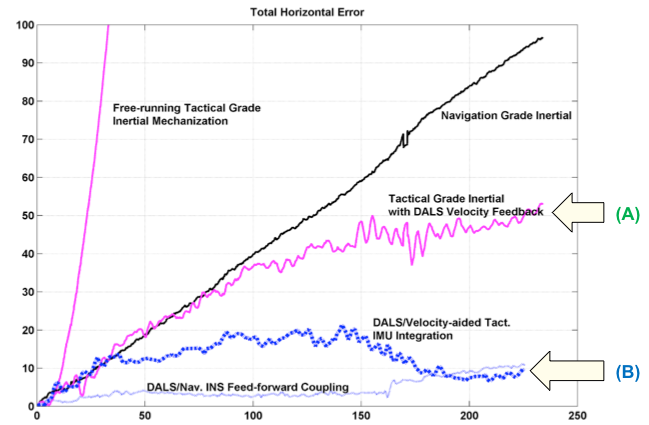
Flight test results
Further Evaluation using Simualted Data
Tight Coupling/Integartion