Students: Pengfei "Phil" Duan, Matthew Miltner
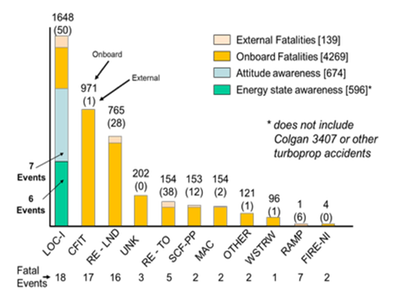
Flight crew’s decision making in the presence of hazard and complexity has long been the leading causal and contributing factors in aviation accidents. In many accidents that happened over the past decades, the flight crew was unaware of the aircraft state during hazard exposure and, hence, corrective actions were not taken in time. For example, the lack of aircraft state awareness has caused notable aircraft accidents such as the Air France 447 accident and the Turkish Airways 1951 accident. Investigation of the recent Asiana 214 accident in San Francisco has drawn the attention to this problem again. A Multiple Hypothesis Prediction (MHP) method is developed to provide flight crew with improved aircraft state awareness. In this excerpt we use a Vertical Navigation (VNAV) speed reversion scenario to demonstrate the functionality of the MHP method.
Aircraft state awareness includes:
Energy state awareness: understanding of the relationship between aircraft’s current energy (i.e., kinematic energy and potential energy) and desired energy to prevent aircraft stall or overspeed
Attitude state awareness: determination and prediction of aircraft attitude so that aircraft bank angle, pitch angle, and angle of attack can be restrained within the limits
Two main research thrusts:
Keep the automation going: use synthetic data to improve automation and human-machine interface continuity. Critical flight data are identified and dissimilar sensors and systems are fused to provide the synthetic estimate (e.g., airspeed) in case of sensor failure.
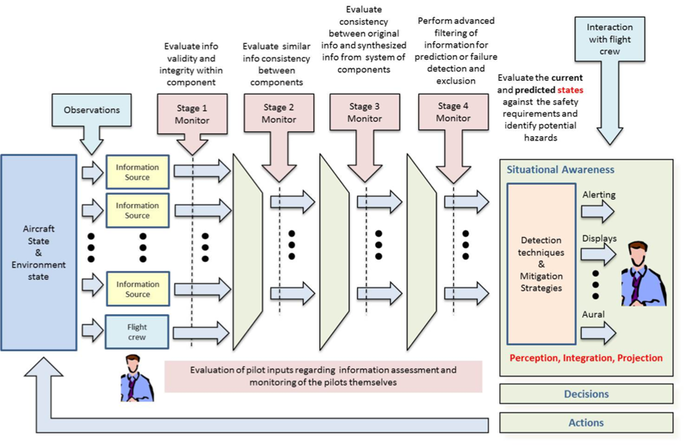
Multiple hypotheses prediction: 1) a stochastic estimator is used to estimate the current aircraft state based on navigation, air data and other aircraft state information. 2) The current aircraft state estimates are projected ahead with the current aircraft mode as well as the scheduled mode transitions. The predicted aircraft states are compared with a set of pre-defined rules. 3) If any of the rules are violated, suggested actions are generated based on changing the dynamic model of the filter to a set of potential models and hypotheses, and comparing their respective cost functions.
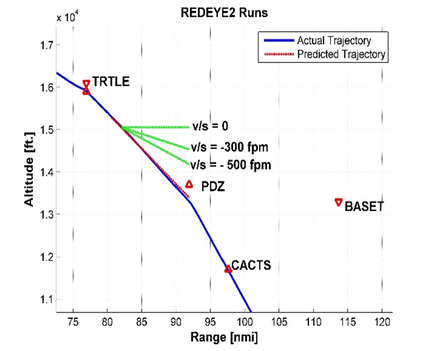
VNAV Altitude Compliance
The Multiple Hypothesis Prediction (MHP) method is used to detect the violation of waypoint altitude constraint caused by VNAV mode confusion. Three hypothetical trajectories are generated where the waypoint constraint can be complied. The options are presented to pilot as suggested actions. Pilot-in-the-loop study has shown generally positive feedback from the participants .
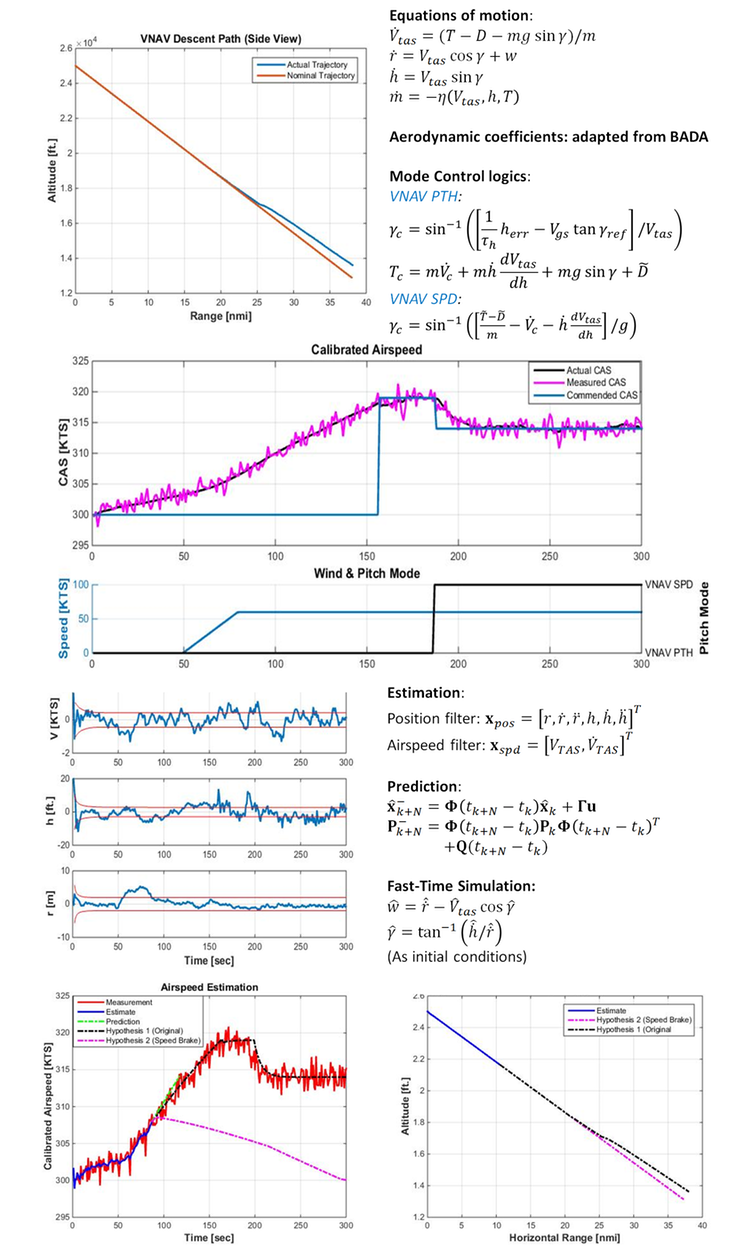
VNAV Speed Reversion
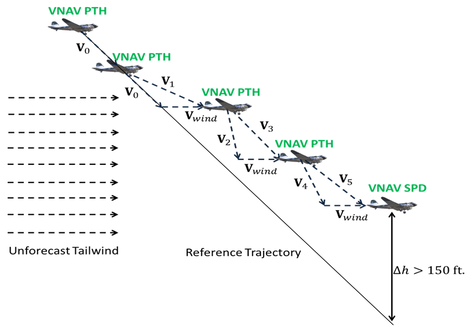
During an unforecast tailwind, the aircraft will accelerate up to a specified airspeed to keep up with the reference trajectory and VNAV allows the aircraft to rise up to 150 ft. above the path. If VNAV can no longer maintain the aircraft within 150 ft. of the path without further acceleration, VNAV switches from VNAV PTH to VNAV SPD, resets the target airspeed, and ignores the nominal VNAV flight path. Similarly, during an unforecast headwind and inactive autothrottle, the aircraft will fly below the path to stop the deceleration. Once VNAV can no longer maintain the aircraft within 150 ft. of the path without further deceleration, VNAV switches from VNAV PTH to VNAV SPD, resets the target airspeed, and ignores the nominal VNAV flight path.
VNAV Speed Reversion Detection/Prediction